自動運転における最大のボトルネックとして、LiDARが挙げられます。
自動運転における「目」とされるLiDARの開発の4つの課題と、意外な障害を紹介します。
LiDARとは
LiDARとは、Light Detection and Rangingの略で、レーザー光を用いて環境中の物体の距離や位置を測定するリモートセンシング技術です。
LiDARセンサーから照射されたレーザー光は、周囲の物体に当たって跳ね返り、センサーに反射されます。このレーザー光の往復の時間から、対象物までの距離が算出されます。このプロセスを1秒間に何度も繰り返すことで、周囲の3Dマップを作成し、マップ上の各ポイントが特定の場所の物体までの距離を表します。
自動運転技術をはじめ、ロボット工学、測量や地図作成、果ては農業にも活用されています。
LiDARの開発課題
LiDAR技術はまだ新しい技術であり、その開発にはいくつかの課題があります。主な課題としては、以下のようなものがあります。
高いコスト
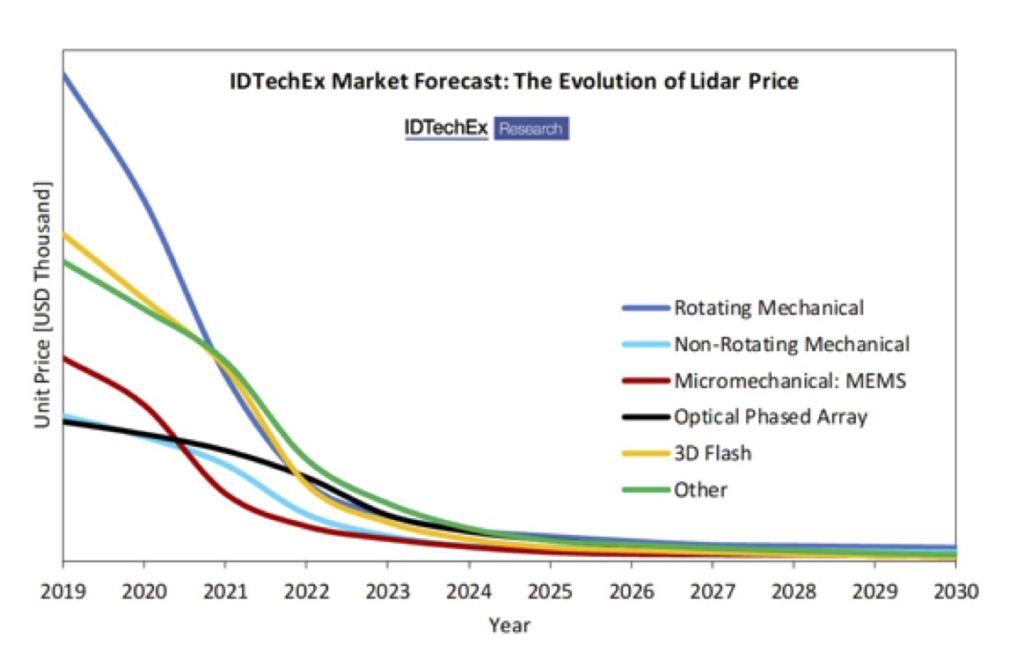
LiDARが直面する最大の課題はコストです。LiDARセンサーは比較的高価であり、特にコストが重要視される自動車業界では、そのコストが普及の障壁になっています。
LiDARに関するすべての課題がコストに直結しています。
LiDARセンサーは複雑で、レーザー、ミラー、ディテクターなどの高精度な部品を使用するため、その製造には高い精度が要求されます。
特に自動車用のLiDARセンサーは、自律走行や地図作成などの重要なアプリケーションに使用され、高い精度と信頼性が要求されます。振動、温度変化、埃や湿気など過酷な環境に耐え、1つの部品が故障してもシステム全体が機能するように、冗長性をシステムに組み込む必要もあります。いずれもコストの上昇につながります。
また、LiDARの技術は比較的新しく、LiDAR技術はまだ開発・改良の途上にあります。開発費がかかるうえに、大量生産されていないため、高価にならざるを得ません。
技術が成熟し、大量生産が可能になれば、LiDARセンサーのコストは低下する可能性があります。さらに、新規企業の参入や研究開発の活発化により、Lidarセンサーの価格は将来的に低下すると予想されています。
距離と解像度のトレードオフ

LiDAR技術が直面するもう一つの課題は、距離と解像度のバランスをとることです。長距離のLiDARセンサーは解像度が低く、短距離のセンサーは高い解像度を持ちます。
長距離のLiDARセンサーは、より広い範囲をカバーすることができますが、解像度が低くなる傾向があります。つまり、より遠くにある物体を検出することはできますが、その物体に関する詳細な情報を得ることができない可能性があります。
解像度が高いLiDARセンサーは、対象物についてより詳細な情報を提供することができますが、通常、検出距離が短くなります。つまり、より近い距離にある物体についてはより詳細な情報を提供できますが、より遠くにある物体は検出できない可能性があります。
距離と解像度のバランスはトレードオフの関係にあり、センサーの選択は特定のアプリケーションと要件に依存します。例えば、自律走行車の場合、安全性を確保し衝突を避けるために、遠距離の物体を検知できることが重要です。一方、地図作成では、詳細な地図を作成するために高解像度がより重要です。
ソリッドステートライダーのように、長距離と高解像度の両方を実現できる可能性を秘めた新技術もあります。しかし、これらは開発の初期段階にあり、まだ広く商業的に利用されているわけではありません。
信号の干渉
LiDARの発する信号が干渉することも、LiDAR開発における大きな課題です。複数のLiDARセンサーを使用して環境からデータを収集するマルチLiDARシステムでよく取り上げられます。
干渉には「直接的な干渉」と「間接的な干渉」の2つのパターンがあります。
直接的な干渉は、2つのLiDARセンサーからの信号が重なって干渉し、不正確な測定につながる場合です。これは、2つのLiDARセンサーが互いに接近して配置されている場合や、同じ方向を向いている場合に起こります。
間接的な干渉とは、あるLiDARセンサーからの信号が物体に反射し、別のLiDARセンサーからの信号と干渉することで発生します。これは、2つのLiDARセンサーが互いに近接して設置されているが、同じ方向に向いていない場合に起こります。
LiDARシステムにおける干渉の影響を軽減するためには、LiDARセンサー間を十分に離す、LiDARセンサーに異なるタイムスロットを使う(最も一般的で、Time Division Multiplexing (TDM)と呼ばれます)、異なる周波数を使用するなどが挙げられます。
LiDARの干渉は複雑な問題であり、特定のアプリケーションとLiDARシステムが使用される環境に応じて異なります。
memo
LiDAR同士の干渉の他に、無線周波数干渉(RFI)や電磁波干渉(EMI)など、他のソースからの信号がLiDARセンサーからの信号に干渉する場合に発生することがあります。金属製の筐体や電磁波シールドを使用して、RFIやEMIの影響を低減することで対策する場合があります。
データ処理と解釈
LiDARセンサーは大量のデータを生成するため、リアルタイムで管理・処理することが困難な場合があります。これは、自律走行車のように、リアルタイムで意思決定を行うためにデータを迅速に処理する必要があるアプリケーションでは、特に困難です。
LiDARデータは、建物や他の物体からの反射によるノイズの影響を受けることがあり、データから正確な情報を抽出することが困難になることがあります。また、天候変化による誤検出などの異常値も、正確な情報を抽出することを難しくします。
LiDARデータは点群データとして表現されることが多いため、加工や解析が困難な場合があります。これは、点群が非常に非構造的であり、従来の画像処理技術が適用できない場合があるためです。
結果として、LiDARデータ処理アルゴリズムは複雑で計算コストがかかる場合があります。セグメンテーション、クラスタリング、分類、追跡などの複数のステップを含むため、複雑で難しいものになり、リアルタイムアプリケーションへの実装が難しく、また開発コストが高くなる可能性があります。
これらの課題を克服するため、研究者やエンジニアは、機械学習アルゴリズム、3Dコンピュータビジョン技術、高度な点群処理方法など、LiDARデータ処理を改善する新しい技術やアルゴリズムの開発を進めています。
実用化の目途

LiDARは、既に一部の自動運転車両に搭載されており、実用化は始まっています。現状、高級車から搭載が進んでおり、安全志向の強いボルボの開発するSUV、EX90の2024年モデルにも搭載される予定です。
LiDARの普及時期を正確に予測することは困難ですが、今後5~10年で広く普及していくとの見方が強いです。
まとめ
LiDARの開発課題を紹介しました。
・高いコスト
・距離と解像度のトレードオフ
・信号の干渉
・データ処理と解釈
LiDAR業界の企業は、これらの課題を克服し、LiDAR技術をより費用対効果が高く、小型で、より正確なものにするため、研究開発への投資を継続しています。
コメント